许多患有身体残疾的儿童在使用传统运动设备进行步态康复和健身训练时存在困难,而大多数诊所、医院和学校环境中很少配备提供强化地面行走或基于跑步机的疗法所需的临床医生资源。本研究介绍了一套全面的改进措施的设计与测试,这些改进使儿童能够使用一种 commercially available 的机器人运动设备(即智能控制辅助康复椭圆机(ICARE)),该设备最初是为满足患有身体残疾和慢性疾病的成人的步行和健身目标而开发的。十五名因不同神经性病症正在接受物理治疗的儿童(3–11岁)及其家长被招募参与研究,以评估成人ICARE和儿科改良型ICARE的安全性、舒适度和可用性。在儿童试用每种设备后,记录其反馈意见。为了评估可行性,随后每名儿童使用儿科改良型ICARE参加了最多十次治疗(每周2至5次;平均单次治疗时长:38分钟,范围为21–66分钟)。家长普遍认为,与成人ICARE相比,儿科改良型ICARE明显更安全、更舒适且更易使用。儿童对儿科改良型ICARE的看法也类似,尽管统计上未达到显著性。儿童在133次治疗中累计使用该原型设备超过3800分钟,完成了超过162,000个循环次数。总之,本研究表明,将儿科改良型ICARE作为持续治疗的辅助手段,适用于低至3岁的儿童具有可行性。[DOI: 10.1115/1.4041588]
力量、平衡能力、感觉和耐力方面的受限使得一些身体残疾儿童难以使用传统锻炼设备进行步态康复和健身训练,而大多数诊所、医院和学校环境中又很少具备开展高强度地面行走或基于跑步机的疗法所需的临床医生资源。机器人步态训练器虽可降低人力需求,但技术成本阻碍了其广泛使用。儿童专用设备的缺乏令人担忧,因为参与中等强度持续锻炼有助于增强力量、柔韧性及心血管健康以及功能,并且还可以预防或延缓其他慢性疾病的 onset [1–5]。
越来越多的康复机构、健身场所和家庭环境正在使用智能控制辅助康复椭圆机(ICARE)——一种商用的电机辅助椭圆机,以改善受多种疾病和健康状况影响的成人和青少年的步行能力和体能水平(图1)。与其他椭圆机相比,该设备促进了一种更接近正常步态的关节运动和肌肉负荷模式[6],同时提供可调节的电机辅助水平,使用户能够在前方或反向方向以最高65每分钟循环次数(CPM)的速度进行训练[7,8]。当用户超过设定速度时,电机会自动断开,促使用户依靠自身力量维持运动[9]。速度、体重支撑(BWS)、电机辅助/阻力水平以及步长均可根据用户的特定步态和心肺功能训练需求进行个性化设置。
ICARE面临的一个挑战是,该设备最初并未针对年龄较小或体型较小的学龄前儿童进行设计[13]。例如,3至12岁儿童的平均步长范围从短至35厘米到长达61厘米(上限接近成人的71厘米步长)[14,15]。然而,按照原始设计,并未考虑到更短步长的需求。我们团队部分通过创建一种改良曲柄机构来应对这一挑战,使可变步长得以缩短,以满足低至3岁儿童的需求[16]。尽管该改良曲柄机构解决了较年幼儿童使用中的一项明显障碍,但根据已发表的人体测量数据、我们团队对临床医生尝试将该设备用于幼儿时的观察,以及此前来自临床医生和父母的反馈(表1),仍存在多种障碍。例如,儿童的腿长较短(3岁儿童平均腿长¼ 47 cm,成人¼ 90 cm)[17–20],骨盆宽度更窄(3岁儿童平均宽度¼ 17 cm,成人¼ 32 cm)[17–20],导致幼儿在踏板上站立时双腿外展程度大于成人。较短的腿长也使一些儿童上下设备和座椅变得困难。同样,幼儿身高较矮(3岁儿童平均身高¼ 83 cm,成人¼ 169 cm)[17–20],使得部分儿童难以看到和操作控制台;上肢较短(3岁儿童肩部到手腕平均长度¼ 47 cm,成人¼ 56 cm)[17–20],使得操作交替移动把手变得困难;而手部较小(3岁儿童平均手长¼ 11 cm,成人¼ 18 cm)[17–20],也使得抓握某些把手具有挑战性。
本研究介绍了一套全面的ICARE改进措施设计,使得低至3岁的儿童也能使用该设备,并包含了一项初步研究的数据,评估了将儿科改良型ICARE作为物理治疗辅助手段用于因多种基础诊断导致功能受限儿童的可行性。本研究解决了对价格合理、可调节的儿科设备的需求,此类设备不仅需适应不同患者群体不断变化的治疗需求,还需适应不同体型范围。
参与者
十五名儿童(3–11岁)因患有不同类型的神经性病症,正在接受物理治疗(n ¼ 3名住院患者,n ¼ 7名门诊患者,n¼ 5名接受学校内治疗),从玛多娜康复医院(内布拉斯加州林肯校区)及周边社区招募,并由其家长陪同参与一项研究,以评估ICARE和儿科改良型ICARE在使用过程中的安全性、舒适度和可用性(表格 2)。本研究有意纳入具有不同诊断、功能能力和年龄的儿童,以涵盖可能最终使用儿科改良型ICARE设备的儿童群体的多样性特征。
仪器设备
每位参与者均对未改良型E872MA ICARE电机辅助椭圆训练器(华盛顿州伍丁维尔SportsArt公司)以及已改良用于低至3岁儿童使用的E872MA ICARE进行了反馈。下文提供了未改良型和改良型设备的详细信息,以及用于支持体重的吊带和用于量化步行速度的仪器化步道的相关信息。
未改良的电动辅助椭圆机
未改良的ICARE系统包括一个坡道(13%坡度)、平台(高¼ 20厘米;长¼ 136.5厘米;宽¼ 114厘米)、两个台阶(每个高 10厘米)以及一个电子高度可调、手动旋转座椅(90度)。左右两侧均设有开口,便于使用者接近设备。座椅高度可在踏板平均高度以上47厘米至77厘米范围内调节。座椅前缘位于踏板前后平均位置后侧16厘米处。踏板(长¼ 40厘米;宽 ¼ 19厘米)间距为 10厘米(即踏板内侧边缘之间的距离),并配有可调节的魔术贴(Velcro,英国伦敦)绑带和弹性包裹装置,以帮助固定脚部位置。步长可通过控制台及往复移动把手上的按钮进行电子调节,范围为46厘米至74厘米。主控制台(宽42厘米,高40厘米)安装位置使其下边缘高于踏板平均高度约110厘米。控制台除用于启动和停止设备以及控制速度和步长外,还可显示部分数据摘要(如使用设备的总时间、速度和步长)。此外,也可通过设备配备的有线遥控器调节速度。电机辅助训练可在正向或反向方向上以最高65次/分钟的速度进行。当使用者训练速度超过设定速度时,电机会自动脱离。尽管该设备包含多种传统的椭圆机阻力模式,但由于儿童的身体能力限制,这些模式未被评估。设备提供三个把手:固定三角把手(位于踏板上方89厘米处)、把手杆(可调节至踏板上方 71厘米至103.5厘米范围内)以及往复移动组(顶部位于踏板上方140厘米处,在前后方向上的移动范围根据步长设置在32厘米至46厘米之间)。集成的减重支持系统最多可支持205公斤的体重。
电机辅助椭圆机的儿童适应性改造
在本研究开始前的2年期间,我们对一台独立的E872MA ICARE电动辅助椭圆训练器(华盛顿州伍丁维尔SportsArt公司)进行了一系列改进措施,并逐步优化,以满足低至3岁儿童的需求。这些改进措施基于已发表文献中的人体测量学和步态数据,[17,18]并结合了我们组建的消费者咨询委员会所持续提供的反馈(成员包括残疾儿童家长、临床医生和研究人员)、制造商意见、研究团队成员的正式头脑风暴、针对有或无残疾儿童的技术原型早期初步测试,以及在早期原型开发过程中来自儿童和家长的非结构化访谈和反馈。本研究中测试的一系列儿童适应性改装(表格1)如下所述。
改良座椅
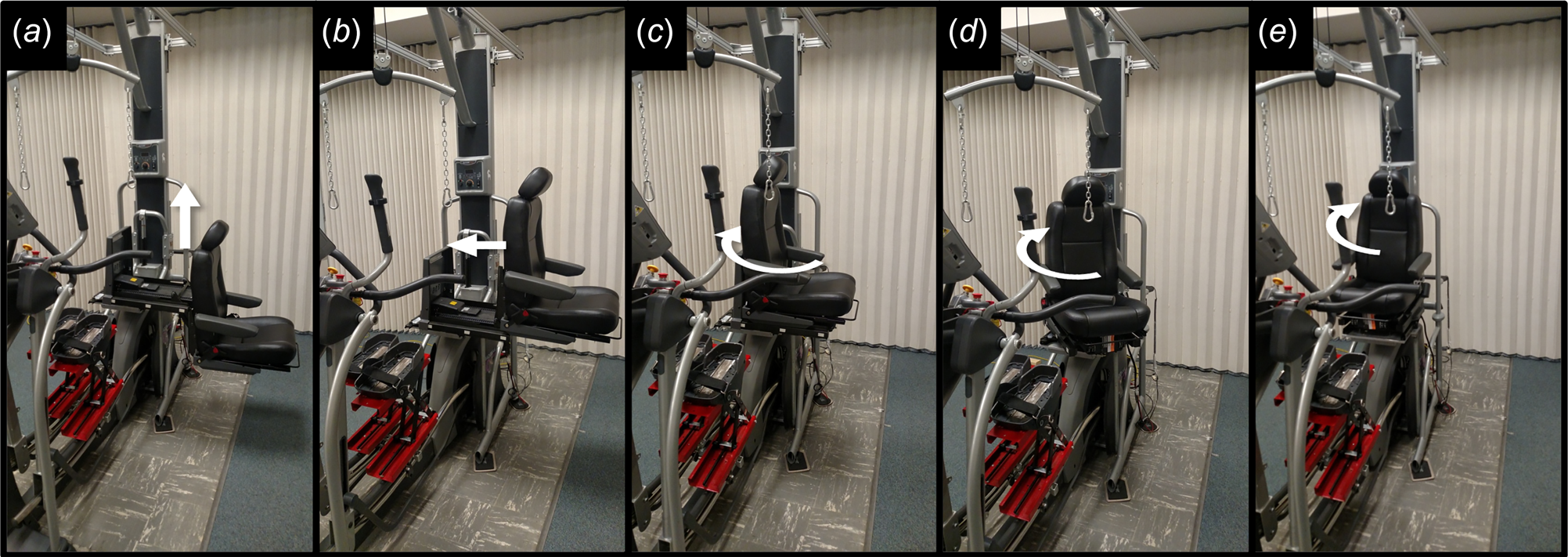
为了减小ICARE系统的占地面积并方便儿童出入,将商用Bruno ValetVR Plus(型号VSS‐2602)汽车座椅与ICARE系统集成。这需要进行结构改装以固定将商用座椅改装到ICARE上,安装防倾翻杆以防止在提升较重用户时ICARE支撑系统发生侧翻(座椅提升能力为168千克),并配备用于操作汽车座椅的电源。安装完成后,用户可从轮椅或站立姿势进入座椅。按下控制按钮后,座椅会升起,缩回至ICARE底座上方,并旋转使用户面向前方,为设备使用做好准备(图2)。座椅还可前后移动,以便在站立前将用户的脚置于踏板上方。这些改装共同减少了ICARE的占地面积,不再需要坡道和平臺。
踏板高度可调节性
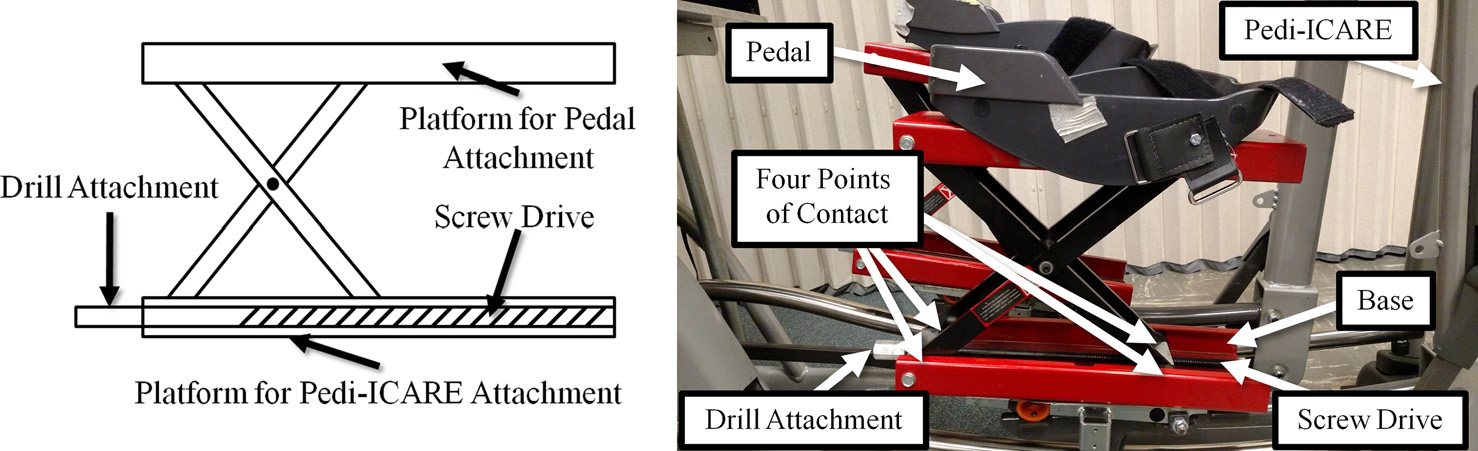
为了使儿童能够看到并与控制台进行交互,集成了一种高度可调的踏板。可以使用电钻调节螺杆式千斤顶(ZENY摩托车千斤顶;ZENY产品公司,加利福尼亚州兰乔库卡蒙加),将每个脚踏板从原始ICARE踏板高度垂直升高38厘米(15英寸)。每个千斤顶的承载能力(500千克)超过了使用该设备的儿童和成人的需求,也超过了ICARE制造商规定的负载限制。当直接安装到ICARE框架上时,踏板可降低至接近原始踏板高度。千斤顶的下表面通过四个螺栓连接到ICARE的踏板安装面(图3)。同样,每个ICARE踏板也通过四个螺栓连接到千斤顶的上表面。
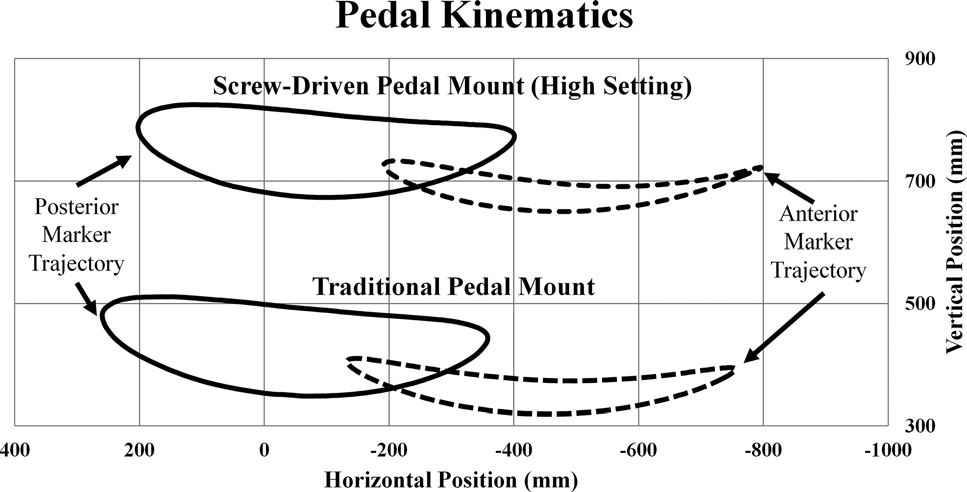
为了确认改良型踏板安装方式未显著改变踏板的轨迹,进行了运动学分析。将反光标记贴在右踏板外侧(前侧和后侧),并在ICARE以35次每分钟、步长为61厘米(24英寸)循环运动时记录运动学数据(Qualisys动作捕捉系统,九个Oqus 400系列摄像头;200赫兹)。分别在螺杆驱动踏板千斤顶安装座上将踏板设置于33厘米(13英寸)高度以及在传统ICARE安装位置安装踏板的情况下记录数据。对每种安装位置(升高和传统)及每个反光标记(前侧和后侧)的八步数据取平均值,以生成代表性轨迹(图4)。多重相关系数统计[21]比较了踏板安装座处于最高位置时产生的矢状面运动学波形与传统ICARE踏板安装座所产生的波形。在对踏板高度差异进行归一化处理后,每次比较得出的多重相关系数值均超过0.99,表明波形之间具有高度相似性(注:零值反映高度不同的模式,而接近1的值表示高度相似)。
更大的步长可调性
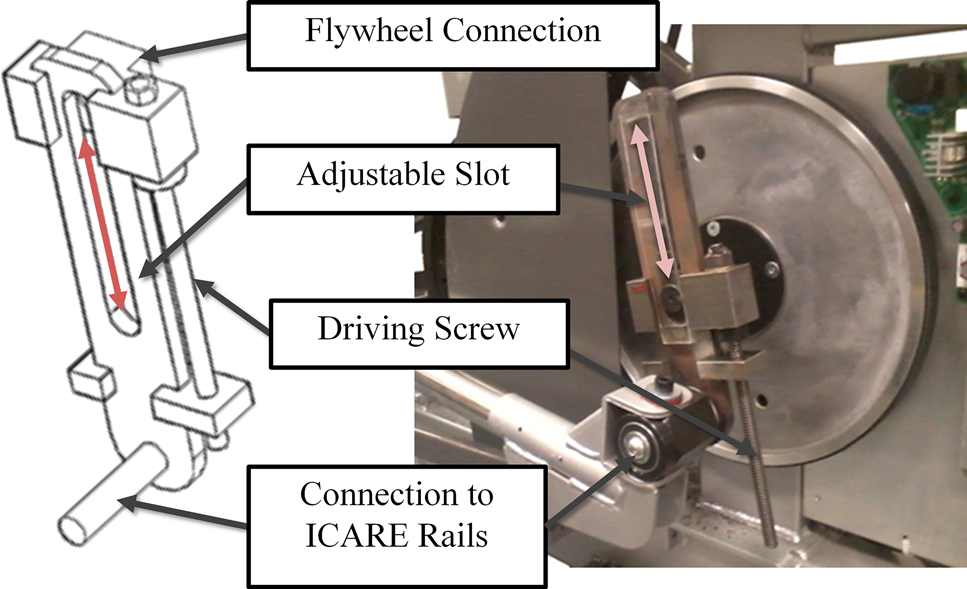
为了适应幼儿较短的腿部长度和步长,包括那些可能存在髋关节屈曲挛缩/僵硬的情况,需使用可调节曲柄机制was created[16]以替换ICARE原有的固定长度曲柄(图5)。通过旋转螺钉可调节曲柄长度。使用新的可调节曲柄时,水平位移范围为19至71厘米,而传统曲柄为46至74厘米。同样,步高(前踏板上标记点的垂直位移)使用可调节曲柄时最小可达5厘米,而传统曲柄最小为12厘米。
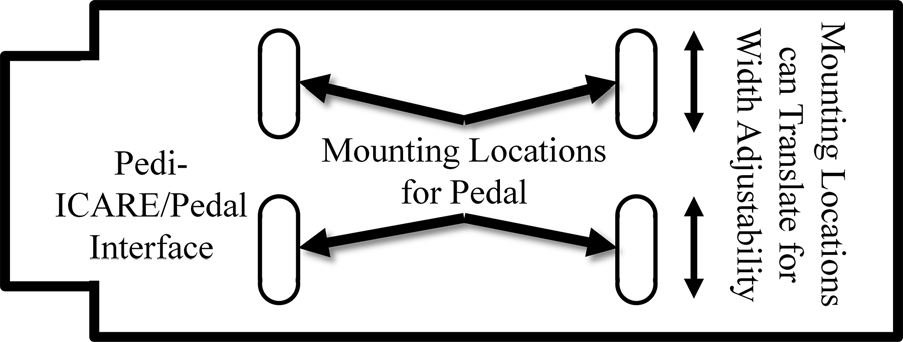
步宽可调性
通过减小踏板间距,避免幼儿腿部在使用时过度外展使用时,对踏板安装座进行了改良型设计。具体而言,在踏板与椭圆接口之间的每个安装点增加了一个带有螺栓槽的安装板,使冠状面内踏板内侧边缘之间的距离可调节范围从2.5厘米至15厘米,而此前为固定的10厘米(图6)。
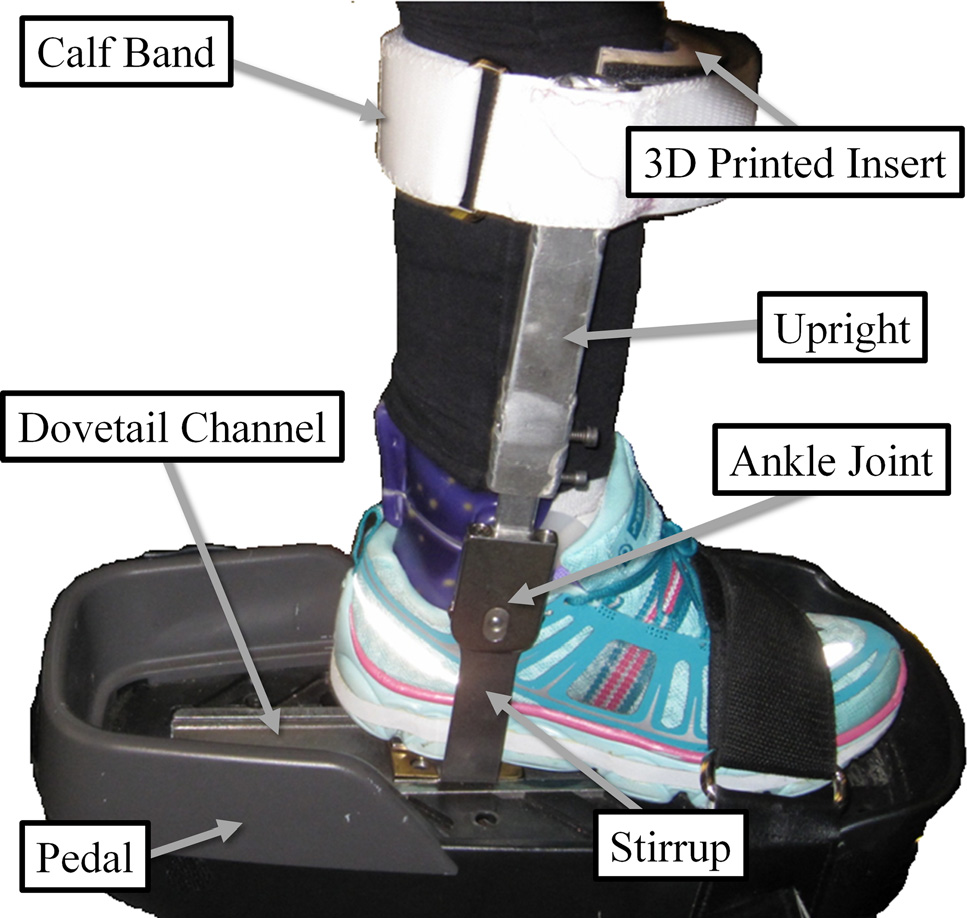
踏板集成式踝足矫形器
预计一些使用该装置的儿童可能存在小腿无力,这会限制他们在训练期间的稳定性和耐力。为应对这一挑战,我们的团队将踝足矫形器(AFO)与每个踏板集成。由此形成的踏板集成式AFO包含一个通过燕尾榫连接将支具固定到踏板的马镫结构(图7)。该踏板集成式AFO可实现前侧平移踏板后侧设有可拆卸部件,并通过设备的踝关节连接两个高度可调的金属立柱。设备踝关节的前侧和后侧通道中设有紧定螺钉,可在使用过程中定制背屈/跖屈活动范围。金属立柱上的紧定螺钉可调节小腿绑带的高度。可调节小腿带采用魔术贴(Velcro,英国伦敦)固定适当尺寸的3D打印嵌件,围绕胫骨前部实现稳定且舒适的环形贴合。
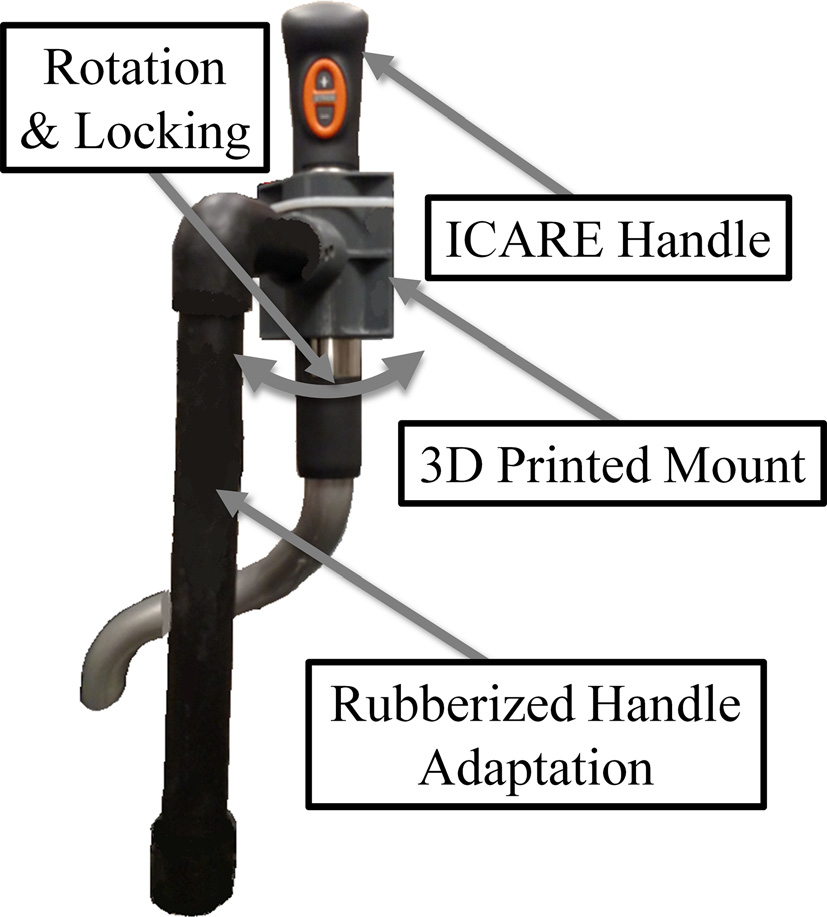
改良的交替移动手柄
一组新手柄被创建并连接到现有的交替移动手柄上,以便儿童更容易触及和使用。这些手柄由聚氯乙烯(PVC)制成,包括管材(3.8 厘米直径)、90度滑动弯头和端盖。为了提高握持的舒适度和防滑性,PVC 表面涂覆了橡胶(Plasti Dip,明尼苏达州布莱恩市)。改良后的手柄通过一个3D打印手柄接口连接到现有的交替移动手柄上。PVC 部分向垂直方向延伸15厘米,向下延伸30厘米至现有交替移动手柄(图8)。这使得手柄位置更近,手臂较短或身材较矮小的儿童在使用时无需过度前倾或向上伸展。
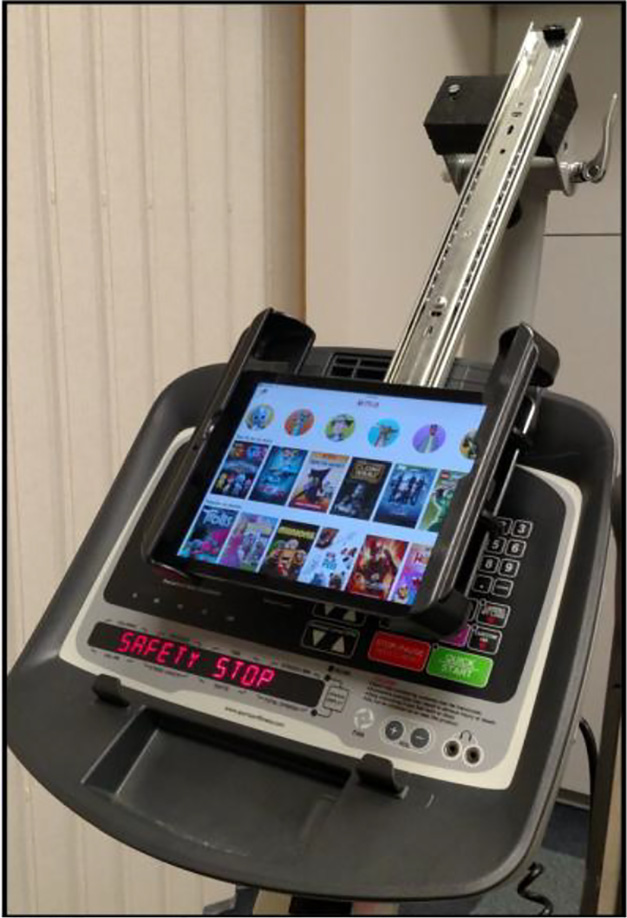
用于平板电脑的控制台适配
设计了一种安装系统,使临床医生和父母能够在儿童使用ICARE时整合基于平板电脑的活动(例如,教育类应用程序或视频)(图9)。该装置由带紧定螺钉调节功能的球轴承滑动系统、商用平板支架(RAM Tab‐Tite;RAM Mounts,西雅图,华盛顿州)以及摩擦铰链组成。该平板支架可安全固定不同尺寸的平板电脑,宽度范围为20至30厘米,高度可达21厘米。滑动系统和摩擦铰链使平板电脑能够轻松升高和降低,从而适应不同身高的用户,并便于访问下方的控制台。
儿童使用的安全背带
ICARE 的减重系统可与多种安全背带配合使用。鉴于以往使用各种背带的经验,我们的团队选择使用缅因抗重力系统背带(695 SHBD MAGS 悬吊背心;Main Anti‐Gravity Systems, Inc.,波特兰,缅因州)。共需要四种尺寸:儿科、特小号、小号和中号。
仪器化走道
在地面行走过程中,使用GAITRiteV R Platinum 电子走道(CIR Systems 公司,新泽西州克莱夫顿)测量步态时空步幅特征。走道的总体尺寸为长 574 厘米、宽 90 厘米,有效记录区域为 490 厘米 × 61 厘米。步态数据以 120 赫兹的频率记录。
程序
该研究项目和知情同意书已获得玛多娜康复医院机构审查委员会的批准,所有测试均在康复科学与工程研究所进行。在获得知情同意和同意书后,并在开始测试之前,由儿童的父母或法定监护人填写《病史筛查表》以及《人人适用的体力活动准备问卷》(PAR‐Qþ)。这些表格上记录的信息用于筛查任何可能增加儿童参与风险的潜在医疗状况(例如,先天性心脏病、不稳定愈合的骨折)。当发现显著状况时,需获得医生许可。在完成问卷并获得医生许可后,记录基本的人体测量数据,包括身高和体重。
对ICARE和儿科改良型ICARE的反馈
接下来,要求父母和儿童针对未改良型和儿科改良型ICARE设备提供反馈(图10)。首先,每个儿童都有机会尝试使用未改良型ICARE,包括在有或没有电机辅助的情况下。然后,要求父母和儿童完成一系列关于他们对设备安全性(0分表示“完全不安全——如果没有人看护,我的孩子会受伤”;100分表示“非常安全——我的孩子可以使用该设备而无需担心受伤”)、舒适度(“完全不舒适”对比“非常舒适”)以及可用性(“我的孩子不想使用它——对他/她来说毫无用处”对比“我的孩子非常想使用它——非常适合他/她”)的视觉模拟评分(VAS)问题。同时收集了有关提高安全性、舒适度和易用性的改进建议的定性意见。随后,对儿科改良型ICARE重复了此流程。
使用儿科改良型ICARE增强物理治疗的可行性
在反馈会话后,每名儿童计划接受最多十次治疗(每周二至五次;平均每次治疗时长:38 分钟,范围 21–66 分钟),以评估将儿科改良型ICARE用于不同功能能力儿童的可行性。儿科改良型ICARE作为现有治疗的辅助手段使用,并未要求每名儿童接受相同次数的治疗。初始设置(即踏板高度、步幅长度、把手、骑行速度和电机辅助水平)依据前次反馈会话中的偏好设置进行调整。后续治疗则根据每名儿童的具体需求进行个性化调整。
数据管理和分析
来自三名无法交流的儿童和四名未表现出理解量表所需认知能力的儿童未被纳入分析。其余定量和定性数据(15名家长,8名儿童)从 SELECT SURVEY VERSION 2.3.4软件导出至Excel(微软公司,华盛顿州雷德蒙德)电子表格,用于后续分析。对定量VAS评分采用 SIGMAPLOT 11.1软件(Systat 软件公司,伊利诺伊州芝加哥)和 Excel进行描述性统计分析。使用夏皮罗‐威尔克检验筛查 VAS数据的正态性假设。若满足正态性假设,则分别对家长和儿童的反应进行配对样本t检验,以确定改进措施是否对儿科改良设备相较于未改装设备在安全性、舒适性和可用性方面的整体感知产生影响。若违反正态性假设,则采用非参数等效的威尔科克森符号秩检验。统计显著性定义为p< 0.05。计算得分范围及差异的95%置信区间。研究团队成员对定性自由文本回答进行审阅,以识别与提高成人ICARE和儿科改良型ICARE的安全性、舒适性和可用性相关的主题。
关于智能控制辅助康复椭圆机及儿科改良型智能控制辅助康复椭圆机的反馈
父母和儿童对每台设备的感知的安全性、舒适性和可用性提供了反馈。此外,还收集了有关改进每台设备设计的想法和建议。
成人ICARE与儿科改良型ICARE的定量比较
不出所料,父母普遍认为,与成人ICARE相比,儿科改良型ICARE在安全性、舒适度和可用性方面显著更优(表格3)。在各个类别中,儿童(n ¼ 8,考虑到沟通和理解方面的挑战)对儿科改良型ICARE的评分平均比ICARE高37%;然而,这种改善仅在可用性类别中具有显著性。
改进各设备的建议
家长最常提出的关于提高成人ICARE的安全性、舒适度和可用性的建议是降低控制台和车把(跨类别共¼ 20条评论)。相比之下,在使用儿科改良型ICARE时,此类评论仅出现一次。家长经常建议缩小成人ICARE(n ¼ 19)以及缩短步长(n ¼ 17),但这些方面在儿科改良型ICARE中并未被列为关注问题。许多家长反映成人ICARE的踏板过大(n¼ 10)、在冠状面上间距过宽(n ¼ 4),以及踏板绑带不适合固定儿童脚部到踏板(n¼ 6);然而,采用儿科改进措施后,这些问题的发生频率明显减少(分别为¼ 4、2和3条评论)。多条评论指出幼儿在转移到成人ICARE(n ¼ 5)以及接触设备的高度可调座椅时遇到困难(n ¼ 4),但在使用儿科改良设备后,这些担忧明显减少(n¼ 1建议降低座椅高度)。尽管在成人ICARE上未被列为问题,但针对儿科改良型ICARE收到了六条关于改善上肢把手抓握的建议。在评估过程中,每个儿童所佩戴的商用背带的安全性、舒适度和可用性在成人ICARE(n ¼ 11)和儿科改良设备(n¼ 14)中均引起了显著关注。当被问及如果ICARE可用,他们的孩子是否会使 用时,15位父母中仅有6位回答“会”。相比之下,15位父母中有14位表示如果儿科改良型ICARE可用,他们的孩子会使用。在一名儿童参与初期,一个踏板松动并发出不良噪音,导致家长出于对儿童安全性和受伤风险的短期担忧,表示不会使用该原型儿科改良型ICARE。然而,在踏板问题解决后(下次干预前),该家长和儿童完成了整个干预研究。
儿童在使用成人ICARE后仅提供了11条反馈,在使用儿科改良型ICARE后提供了10条反馈。与家长的反馈类似,儿童对ICARE的大部分反馈(55%)涉及设备尺寸问题。对于儿科改良型ICARE,则未提供任何关于尺寸的反馈。在使用ICARE后,仅有一名儿童指出背带需要改进;而在使用儿科改良型ICARE后,有四次(40%)反馈提到了背带相关问题。仅有两名儿童表示如果可用他们会使用ICARE,而九名儿童表示不会使用。相比之下,八名儿童表示如果可用他们会使用儿科改良型ICARE,而两名儿童表示不会使用。其中一名儿童给出的理由是“因为”,另一名儿童未提供具体原因。


鉴于存在行走障碍的儿童所占比例相对较小(在美国5至17岁年龄段人口中不足1%)[22],且该群体的身体人体测量学特征差异较大,因此针对这一人群开发经济实惠的机器人步态技术受限也并不意外。结果,许多患有步态障碍的儿童无法获得有效且负担得起的锻炼设备,这些设备本应专门针对行走所需的肌肉和动作,同时促进心血管健康。若缺乏充分的训练,许多儿童在外出活动或在学校期间难以跟上家人和同龄人。儿童还可能因此失去运动带来的更广泛的健康益处,包括整体健康、肌肉与骨骼力量增强以及情绪健康[23]。
成功开发ICARE为后续研发面向幼儿的经济型机器人设备原型提供了自然的基础。团队最初考虑专门为年龄更小、体型更小的儿童设计独立的设备。然而,与临床医生和特殊教育工作者的进一步讨论揭示了这种做法的潜在局限性。特别是,诊所和学校通常需要照顾不同年龄和体型的儿童。由于资金和空间有限,大多数机构更倾向于采用一种统一设备,以满足学校、儿科及其他综合康复环境中常见的广泛人体测量数据和功能能力需求。这种方法还被认为在工装、组装和持续维护过程中提高生产效率,从而促进设备的 affordability(可负担性)。
尽管统一设备的设计理念对临床医生和特殊教育教师具有吸引力,但最终残疾儿童及其父母需要确信该设备安全、舒适且易于使用,才有可能被采用。一系列改进措施在2年中不断创建和完善。开发阶段,包括重新设计的座椅以方便幼儿使用,并消除对坡道和平台的需求;可调节踏板以适应幼儿较短的腿部和体型;集成式可拆卸踝足矫形器以增强腿部严重无力儿童的稳定性;改良型曲柄组件以适应低至3岁儿童的较短步幅;以及把手改装,使上肢较短/较小的儿童也能参与锻炼。最终研制出的儿科改良型ICARE在父母中的评价显著更积极,各项类别的平均VAS评分在87.7至90.9之间,而使用未改装设备时的平均评分为37.5至44.3。儿童的VAS评分也明显提高,但由于能够提供VAS数据的儿童数量较少(n¼ 8),变化并不总是具有显著性。我们在获取幼儿可靠量化数据方面的困难进一步凸显了在研究过程中征求父母/看护者意见的重要性。尽管仅有40%的父母表示愿意让孩子使用未改装设备,但93%的父母表示如果儿科改良型ICARE可用,他们愿意让孩子使用。
根据本研究前后进行的调查,最关键的改进措施包括:升降脚踏板(以便与控制台交互并触及把手)、改良步长(以适应儿童较短的步长)、步宽调节(预期可改善下肢在冠状面的体重支撑姿势)以及优化的升降旋转座椅设计(以方便设备使用并在空间受限时减少设备占地面积)。虽然非必需,但改良旋转手柄还允许手臂较短的年幼儿童安全地使用交替移动把手。此外,儿童也可选择使用两组固定手柄。对于踏板的集成脚蹬设计,另一种选择是儿童佩戴其踝足矫形器;然而,当小腿无力的儿童忘记携带其踝足矫形器时,或当下肢在冠状面需要额外控制时,集成脚蹬则具有优势。此外,系统的外部安全带可在需要时用于提供额外的体重支撑,并减少矢状面和冠状面的负荷。
尽管在安全性、舒适度和可用性方面已有改进,但设备仍有进一步优化的空间。特别是,虽然将踏板间距从固定的10厘米缩小至可调节的2.5厘米被认为是有益的,但用户仍希望提供更小号的踏板。未来的设计可考虑集成插入件以实现这一目标。通过将脚部向踏板内侧边缘定位的改进措施有望解决这一问题。另一个需要关注的问题是,需进一步优化儿科改良型ICARE的把手,以适应手部握力较小或较弱的儿童使用。最初的把手改装虽使把手更靠近儿童身体,但采用的是直径3.8厘米的PVC管材,该直径被认为过大。未来若能设计出适用于不同手部尺寸的渐变式把手,将更有助于满足更广泛人群的需求。最后,父母和儿童均反映在使用未改装及儿科改良型ICARE设备时,商用背带的舒适度存在问题。特别是儿童身体在背带中出现下滑现象,导致腋下区域和颈部周围压力过大。舒适度方面的局限性在各类背带设计中普遍存在,亟需进一步的研究与开发。
可行性研究的数据提供了初步证据,表明儿科改良型ICARE可用于年龄低至3岁的儿童,这些儿童因多种基础诊断而存在功能受限。总计15名儿童参与了133次治疗次数,使用原型设备超过3800分钟和162,000个循环次数。每个儿童的典型设置时间少于5分钟,部分儿童可在不到1分钟内开始。一名身体和认知挑战更大的儿童需要 10分钟进行设置。13名儿童能够在不同治疗次数中短暂地超越电机控制,突显了利用设备不同功能来应对儿童力量和协调性的能力。尽管原型设备可将步长减小至19厘米(7.5英寸),但实际使用的最短自选步长为25.4厘米(10英寸),表明当前的调节范围足以满足幼儿的需求。同样,尽管改良设备允许踏板相对于原始踏板高度最高抬升38厘米(15英寸),但实际使用的最大踏板高度仅为35厘米(13.8英寸),表明当前踏板高度可调节性范围足以满足较小儿童的需求。
总计,整套原型修改的成本约为8000美元,如果将设计投入批量生产,预计成本将会下降。其中电动改装座椅最为昂贵,因为我们选择使用一种常用于卡车/汽车中的商用座椅,以提高可及性。实际上,我们预计在大批量生产的情况下,最终改良座椅设计的制造成本将显著降低,并且部分成本将被抵消节省了坡道、平台和现有座椅所需的费用。第二昂贵的改进措施是曲柄机构,因为小批量定制加工的需求。其他改进措施,包括踏板千斤顶、改良型手柄以及集成踏板的踝足矫形器,使用了相对便宜的部件和/或3D打印组件。
尽管超出了本研究的范围,但未来使用儿科改良型ICARE的病例研究、病例系列以及随机临床试验若能聚焦于同质人群(例如,具有预设粗大运动功能分级系统评分的青春期前脑性瘫痪儿童,或处于创伤性脑损伤恢复慢性期的儿童),并评估干预对功能和心肺适能的短期和长期影响,将大有裨益。
总之,本研究开发了一种经济实惠的原型机器人装置,可用于满足不同年龄和体型儿童的步行和健身目标。该研究证明了儿科改良型ICARE在低至3岁儿童中应用的可行性。未来开展将儿科改良型ICARE干预效果与传统治疗方法效果进行比较的随机临床研究,有助于阐明该原型技术在提升残疾儿童及患有慢性疾病的儿童的功能和体能方面的潜力。
