
微流控芯片:微流控芯片是微流控技术的核心组件,通常由硅、玻璃或聚合物材料制成。芯片上设计有微通道、微阀、泵等结构,用于引导和控制液体的流动。微通道的尺寸通常在几十到几百微米之间,能够实现对液体的精确操控。微流控技术的核心在于对微尺度下流体行为的深入理解和精确控制。
微流体学的基本原理:微流控技术的基本原理包括层流和湍流、毛细作用、表面张力和黏附力等。这些原理在微尺度下表现出独特的特性,如雷诺数较小导致流体流动稳定形成层流,表面张力和黏附力对流体行为的影响显著。
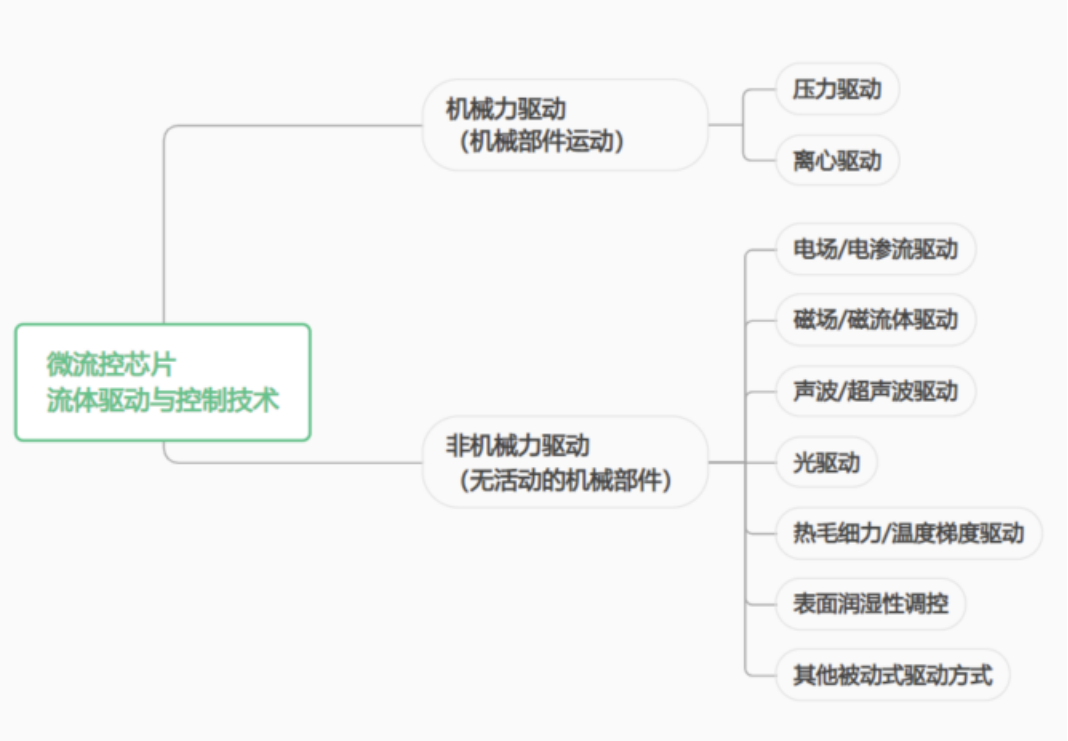
微流控技术通过在微米级通道中对流体的精确操控,实现了分析过程的自动化、高效化和集成化。本文主要汇总了微流控技术中的多种驱动和操控方法,便于芯片设计从业者和对微流控芯片有兴趣的读者们参考学习。
01
压力驱动
基于压力驱动的微流控流体操控技术,是一种利用外部施加的压力差来控制微流体在微通道中的流动和操控的方法,其基本原理是利用外部压力(如气压或液压)推动液体在微通道内流动,从而实现精确的流体控制。[1]这种技术具有多种优势,包括简单高效,能够快速响应并提供稳定的流速,易于实现和商业化,适用于多种实验和流体场景。
压力驱动可以分为外部泵驱动和集成微泵,前者包括注射泵、蠕动泵和真空泵等,注射泵精度高但体积大,蠕动泵适宜连续输送但精度低,真空泵流量大但噪声大;集成微泵基于MEMS技术设计制造,具有微型化、低功耗的优点,但制造复杂、流量小。
02
离心驱动
基于离心驱动的微流控技术是一种利用旋转产生的离心力来驱动液体流动的微流控系统。其核心原理是通过芯片的圆周运动产生离心力,从而实现液体在芯片内的混合、转移、分液和检测等功能。[1]
离心驱动技术仅需一个普通马达即可实现液体的驱动,功率消耗低,设备紧凑,适合集成化设计。离心力驱动的微流控系统能够精确调节流速,适用于不同尺寸管道中的液体流动,且对液体的物理化学性质不敏感,适用范围广。通过调节芯片的旋转速度,可以实现多种操作步骤的集成,如样品预处理、反应混合、检测等,简化了检测流程。且离心驱动液体无残留,适合生物样本(如血液、尿液)和有机溶剂等。
03
电场/电渗流驱动
电渗流驱动技术是一种基于微通道表面固定电荷的物理现象,通过施加电场在微通道内产生定向液体流动的技术。其核心原理是利用微通道表面的固体表面电荷形成双电层(包括紧密层和扩散层),当施加电压时,带电的离子在电场作用下迁移,从而带动液体流动。[1]
与压力驱动相比,电渗驱动的优势包括系统构架简单、操作方便、流型扁平、无脉动等。但电渗驱动易受外加电场强度、通道表面、微流体性质及传热效率等因素的影响,稳定性相对较差。
电渗流在微流控中主要用于液体输送、样品分离、混合与反应、药物递送与组织工程等领域。例如,通过控制电压,可以实现微升至纳升级别的液体精确输送和稳定流动。毛细管电泳的主要驱动力正是电渗流。
04
磁场/磁流体驱动
磁性流体由磁性纳米颗粒悬浮在非磁性载体流体中组成,具有磁性和流体性质。当外部磁场施加时,磁性流体的磁化程度会增加,从而增强其磁性力。这种磁性力可以克服流体力学力,使磁性流体像单一分组流体一样在微流控装置中移动。[2]
通过改变磁场的方向和强度,可以精确控制磁性流体的运动轨迹和速度。例如,在微通道中,磁场可以引导磁性流体沿特定路径流动,实现混合、分离和定位等功能,可应用于液滴和细胞操控。利用磁场与磁珠之间的相互作用,可以实现高效的磁珠分离和富集,广泛用于核酸提取与纯化、血型检测以及病原体检测等。
通过磁场进行流体操控,具有非侵入性、灵活性和控制精确的优势,但在纳米颗粒沉降和磁场均匀性控制等方面还存在一定挑战。
05
声波/超声波驱动
声波/超声波驱动技术的基本原理是利用声波在微流控芯片中的传播和作用,通过声波产生的压力、振动和空化效应来操纵流体和颗粒。具体来说,声波在微流控芯片中可以产生驻波、声表面波(SAW)等现象,引起流体的振动、移动、喷射和雾化等现象,从而实现流体的混合、分离和输送,以及颗粒的分散和聚集等,这些现象可以用于多种应用,包括细胞分离、药物递送、生物传感器等。[3]
声波/超声波驱动技术具有非接触式操作、高生物相容性、高效精确操控、低成本和便携性等优势。但也存在操作范围相对有限,特别是在高频率操作时,设备成本较高;在某些情况下特别是大规模处理样本时,能量传输效率不足;以及制造难度大、成本高等局限性,有待技术成熟度的进一步提升。
06
光驱动
光驱动微流控技术是指使用光诱导或控制液体在微流体系统中运动的技术。光驱动微流控技术涉及多种物理机制,包括使用辐射压力、光镊、光诱导润湿性梯度、热毛细效应、光敏表面活性剂色毛细管效应、光电润湿、光控电渗流和光学双向电泳等。[4]
例如光驱动微泵通过光照射使光可变形薄膜发生形变,从而推动液体输送。或通过激光束的时间间隔扫描来驱动微马达,实现微流体的精确操控。或利用光液化效应,即在光照射下液体表面从亲水性转变为疏水性,实现液滴的精准输送。也可以使用光热材料(包括有机染料和碳基材料),通过光热效应产生热量,引起液滴的热运动。或利用光伏材料在光照下的光伏效应产生的电场驱动液滴。
光驱动液滴操控技术所制作的液滴微机器人和滴微反应器等,在货物运输、微组装、细胞培养等领域具有广泛的应用前景。例如,液滴微机器人可以用于精准的细胞操作和药物递送,而滴微反应器则可以用于高效的化学反应和生物分析。[5]
07
热毛细力/温度梯度驱动
基于热毛细力/温度梯度驱动的技术主要利用温度梯度引起的表面张力变化来实现液体的流动和操控[6]。热毛细力是由于温度梯度导致的表面张力不均匀性引起的,当液体在微流控通道中存在温度梯度时,表面张力会发生变化,从而产生驱动力。例如,疏水性液体倾向于向温度较低的一侧移动,而亲水性液体则向温度较高的一侧移动,这种现象可以通过加热或冷却通道表面来实现,例如使用微加热器或辐射加热方式。
热毛细力可用于实现液滴操控、微泵驱动、薄膜分层和分离等,无需外部机械部件,减少了系统的复杂性和成本,适用于小颗粒或生物材料的对流,具有较高的控制精度。但该技术不适合热敏感反应,需要有非常高的温控精度,同时受到表面亲疏水性的限制,对制造和质控工艺要求严苛,且在大规模流体操控中受限于两相界面的需求,需要客户材料和技术上的挑战。
08
表面润湿性调控驱动
表面润湿性调控驱动的基本原理主要涉及液体与固体表面之间的相互作用,这些相互作用由液体表面张力、固体表面能以及两者之间的界面能决定。润湿性的关键参数是接触角(θ),它反映了液体在固体表面的铺展能力。接触角小于90°表示亲水性,大于90°表示疏水性,接近0°表示超亲水性,大于150°表示超疏水性。[7] 通过改变材料表面的润湿性,可以实现液体的精确操控和运动。
表面润湿性的调控因素包括表面能(通过改变固体表面的化学组成和微观结构来调节表面能)、表面粗糙度、外部刺激(如电场、温度、光照、pH值等)、化学处理和涂层(如疏水或亲水涂层)、温度和压力(例如升高温度可以降低液体的粘度和表面张力)等。通过综合这些因素,可以实现对材料表面润湿性的精确调控,以满足不同应用需求。
09
其他被动式驱动技术
微流控技术中的被动式驱动主要依赖于自然现象(如毛细作用、重力、表面张力等)来实现流体的流动,无需外部动力输入。[8] 被动式驱动方法主要包括:
(1) 毛细驱动:利用液体在微通道中的表面张力和液体与固体表面的接触角差异,通过毛细力推动液体流动。这种方法成本低、设计简单,但流速较慢、精度有限,适用于初筛检测和低精度需求的场景。
(2) 表面张力驱动:通过调整微通道表面的润湿性(亲水或疏水),形成不同的表面张力梯度,从而驱动液体流动。这种方法结构简单,但难以实现高驱动力和精确控制。
(3) 重力驱动:利用液体在重力作用下的流动特性,适用于低速、低精度的流体操控。这种方法成本低,但受重力影响较大,不适合高速或高精度应用。
(4) 压力驱动:通过外部施加的压力(如手动挤压或真空泵)来控制液体流动。这种方法可以实现较高的流速和精确控制,但需要外部动力源,因此不属于完全被动式驱动。
(5) 惯性微流控:利用微通道中粒子和流体的惯性效应进行操控,通过改变通道形状和入口流速来实现颗粒的迁移和聚焦。这种方法在细胞分选和生物医学研究中具有潜力。
(6) 浓度梯度法:利用层流扩散原理,通过改变通道网络的构型和初始溶液浓度,生成线性、指数等多种浓度梯度。这些梯度可以模拟外界环境变化,用于研究细胞对不同浓度梯度的反应。
(7) 其他被动式驱动方法:包括渗透压驱动、静水压力驱动等,这些方法通常结合特定的微通道设计,通过物理或化学机制实现流体操控。
10
多技术耦合驱动
微流控芯片是一种高度集成化的产品形式,在一张芯片中,通常由多种驱动技术进行耦合,比如经典产品Abaxis Piccolo(链接:产品解析 | 第1期:Abaxis Piccolo离心式生化盘片)中,涵盖了离心驱动、表面张力驱动;Cepheid小蓝盒(链接:产品解析 | 第3期:GeneXpert微流控核酸检测卡盒)中,涵盖压力驱动、超声波驱动等。随着微加工工艺的发展,以及对微流控芯片流体驱动技术的不断研究,多驱动技术的耦合操控将进一步提高微流控芯片的集成度和微型化水平,使其在生物医学、化学分析、环境监测等领域的应用更加广泛。
参考文献:
[1] 微流体驱动与控制技术研究进展.力学进展,2022,32(1).
[2] A perspective on magnetic microfluidics, Biomicrofluidics 16, 011301 (2022).
[3] Surface acoustic wave microfluidics, Lab Chip. 2013 , 13(18): 3626–3649.
[4] Photo-actuation of liquids for light-driven microfluidics: state of the art and perspectives, Lab Chip, 2012, 12, 3637-3653.
[5] Light-Responsive Materials in Droplet Manipulation for Biochemical Applications, Advanced Materials, 2024, 37(2).
[6] 《Advances in Microfluidics》,https://www.intechopen.com/citation-pdf-url/29681,
Thermocapillarity in Microfluidics-A Review. Micromachines,2016,7(1).
[7] Superhydrophobic surfaces,J Mech Behav Mater, 2012; 21(1-2), 21-32.
[8] Advances in passively driven microfluidics and lab-on-chip devices: a comprehensive literature review and patent analysis, RSC Adv., 2020, 10, 11652.

