本文还有配套的精品资源,点击获取 
简介:自适应滤波技术通过动态调整以优化信号处理效果,其中”基于最大熵方法的鲁棒自适应滤波及其应用”探讨了利用最大熵原理增强自适应滤波器的鲁棒性,特别是对抗冲击噪声的能力。最大相关熵(MCC)作为性能指标,优于传统均方误差(MSE),能够更好地适应非高斯噪声。文章详细介绍了基于MCC的自适应滤波算法的定义、设置、更新规则和迭代过程。这种算法在通信、音频、图像处理和生物医学信号处理等领域的实际应用显示出显著优势。
自适应滤波技术,作为一种先进的信号处理手段,它的核心在于能够动态地调整滤波器的参数,以适应输入信号的变化和外部环境的波动。自从其概念在20世纪中期被提出以来,这项技术就一直为通信、雷达、声纳、生物医学工程以及金融信号处理等领域提供着重要的支撑。
随着时间的推移,自适应滤波技术已经经历了多个发展阶段,从最初的最小均方(LMS)算法,到更复杂的递归最小二乘(RLS)算法,再到现如今的粒子滤波和深度学习模型,技术的革新不断推动着其应用范围的扩大和性能的提升。
在现代通信系统中,自适应滤波技术的应用尤其关键。面对复杂的传输信道和各种噪声干扰,自适应滤波器能够有效地进行信道估计和干扰抑制,确保信号的传输质量。此外,在语音信号处理、图像去噪、数据预测等领域,自适应滤波技术也显示出其独特的优势和巨大的应用潜力。
2.1.1 熵的概念及其数学描述
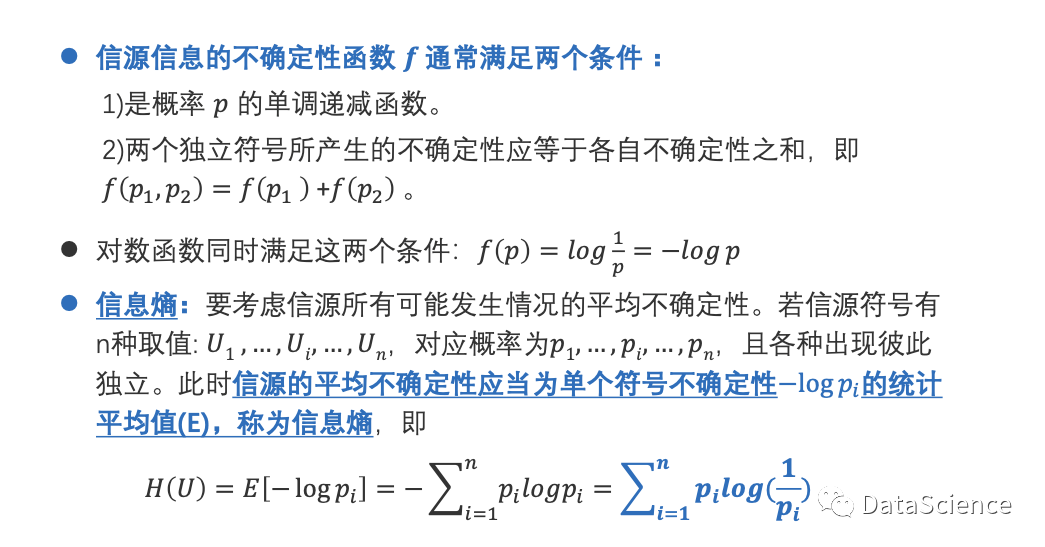
熵是信息论中的一个核心概念,由克劳德·香农引入,用来衡量信息的不确定性。在信号处理中,熵通常表示为信号的概率分布的复杂性或者不规则性。数学上,对于一个离散随机变量X,其概率分布为P(X),熵H(X)可以定义为:
[ H(X) = -sum_{x in X} P(x) log P(x) ]
熵的概念还可以扩展到连续随机变量,此时通常使用微分熵的概念,并且数学描述会涉及到积分运算。熵的最大化对应于概率分布的均匀性,这是最大熵原理的核心思想。
2.1.2 最大熵原理的理论基础
最大熵原理提出,在已知信息的约束条件下,选择概率分布时应使熵达到最大。这种选择假设了对未知信息的最少偏见,即在所有可能的概率分布中,均匀分布(熵最大)是最自然的选择。在信号处理和滤波中,这意味着处理信号时应尽量减少对信号先验知识的假设,从而避免引入主观偏见导致的错误。
2.2.1 最大熵方法的引入背景
在自适应滤波的背景下,最大熵方法被引入是为了应对信号中不确定性的处理。传统滤波方法往往基于信号的某些特定统计特性,而这些特性在实际应用中可能很难准确获得。最大熵方法通过优化熵函数来估计信号的概率分布,从而在没有准确统计信息的情况下,提供一种更加稳健的信号处理方式。
2.2.2 最大熵自适应滤波的理论模型
最大熵自适应滤波器将信号处理问题转化为最大化输出信号的熵。这通常通过拉格朗日乘数法来解决,并将其转化为凸优化问题。在实际应用中,需要将这个问题转化为可以求解的数学模型,比如通过迭代方法逐步逼近最优解。这种模型在处理非线性和非高斯噪声时显示出其独特的优势。
2.3.1 算法的初始化设置
算法的初始化对于最终结果的质量和收敛速度至关重要。初始化包括选择合适的概率分布模型、设置初始的权重参数,以及设定算法的停止条件等。在某些情况下,可以利用信号的先验知识来指导初始化过程,但在最大熵方法中,我们尽量减少这些先验假设。
2.3.2 算法的迭代过程和收敛性分析
最大熵自适应滤波算法的迭代过程遵循一定的规则,逐渐调整权重参数,直至找到最优解或达到预定的迭代次数。收敛性分析需要证明算法在迭代过程中熵值是递增的,并且能够在有限步骤内收敛到最大值。这个过程通常通过数学推导来保证算法的稳定性和效率。
实现最大熵自适应滤波算法的代码示例
import numpy as np
def max_entropy_filter(data, iterations):
# 初始化滤波器权重
weights = np.ones_like(data) / len(data)
data = np.array(data)
for _ in range(iterations):
# 权重更新步骤
updated_weights = np.exp(np.convolve(np.log(weights), data))
# 保证权重和为1的归一化操作
weights = updated_weights / np.sum(updated_weights)
return weights
# 示例信号数据
signal = [1, 2, 3, 4, 3, 2, 1]
# 运行滤波器
result = max_entropy_filter(signal, 10)
print("滤波器权重:", result)
在上述代码中,我们定义了一个简单的自适应滤波函数 max_entropy_filter ,通过迭代计算最大熵分布来更新滤波器权重。权重初始化为均等分布,并在每次迭代后进行归一化处理。这是一个理论示例,实际应用中需要考虑更复杂的概率模型和优化技术。
参数说明:
-
data: 输入信号数据数组。 -
iterations: 迭代次数,决定算法的收敛速度和精度。 -
weights: 滤波器权重数组,用于控制滤波效果。
逻辑分析和扩展性说明:
在实际应用中,可能需要对信号进行预处理,比如去噪或者归一化,以提升算法的效果。此外,权重更新机制也可以进一步优化,比如结合信号处理中的其他技术,如快速傅里叶变换(FFT)来加速卷积计算。最大熵滤波算法的收敛性分析通常涉及凸优化理论,确保算法的稳定性和效率。在实际应用中,还需要通过实验来校准迭代次数和其他参数,以达到最佳性能。
3.1.1 相关熵的定义与性质
在信息论中,熵代表了系统状态的不确定性。对于信号处理来说,熵的概念可以帮助我们理解信号中所含信息的复杂性和不确定性。相关熵是一种扩展的熵概念,它不仅考虑了单个信号的概率分布,还考虑了信号之间的相关性。在自适应滤波中,相关熵用于衡量滤波器输出与期望信号之间的相关程度。
相关熵通常由信号的协方差矩阵来描述,其数学表达式较为复杂,涉及多元统计分析。定义相关熵有助于我们设计更加精细的滤波算法,通过调整参数以最大化信号与期望输出之间的相关性,从而达到性能优化的目的。
3.1.2 最大相关熵的数学表达和优化目标
最大相关熵原理在数学上表现为一种优化问题,其中目标函数通常是相关熵函数,而约束条件则包括信号的概率分布特性或期望值。在自适应滤波的上下文中,最大相关熵的目标是找到一个滤波器的参数集合,这个集合能够使输出信号与期望信号之间的相关熵达到最大。
在实际应用中,这个优化问题常常通过迭代算法来求解。常用的迭代算法包括梯度上升法、牛顿法等。这些算法的目标是通过迭代调整滤波器参数,使得在每个迭代步骤中,相关熵都在增加,直到找到最优参数集合,此时相关熵达到局部最大值。
3.2.1 性能指标的定义
性能指标是衡量滤波器性能好坏的重要参数,常见的性能指标包括均方误差(MSE)、信噪比(SNR)、峰值信噪比(PSNR)等。这些指标能够从不同角度反映滤波器在信号处理中的效果。
在基于最大相关熵(MCC)的性能优化策略中,性能指标通常定义为期望信号和滤波器输出信号之间的相关熵。这个熵值越大,表示两个信号之间的相关性越好,滤波器的性能也就越好。
3.2.2 优化算法的选择和实现
为了优化性能指标,需要选择合适的优化算法。常见的优化算法包括梯度下降法、牛顿法、共轭梯度法等。选择合适的优化算法取决于问题的复杂性、计算资源、优化目标和约束条件等因素。
在实现优化算法时,算法的每一步迭代都会尝试改善性能指标。这通常涉及到对滤波器参数的更新,更新规则通常基于性能指标的梯度信息,以保证每次迭代都能朝着使性能指标增加的方向进行。
3.3.1 实际案例分析
在实际应用中,最大相关熵方法可以应用于各种信号处理任务中,例如语音信号的增强、图像去噪、无线通信中的信号检测等。通过案例分析,我们可以了解到MCC方法是如何针对具体问题进行设计和实现的。
例如,在语音信号增强的案例中,MCC方法可以帮助区分语音信号和背景噪声,增强语音信号的清晰度。实现过程中,需要采集包含噪声的语音信号,并定义一个期望输出信号(如纯净语音)。通过MCC方法,可以设计一个滤波器,该滤波器能够动态地调整其参数,以最大化语音信号的输出和期望信号之间的相关熵。
3.3.2 应用效果的评估和比较
评估和比较应用效果,通常涉及将MCC方法与传统的滤波技术进行比较。这可以通过性能指标来量化评估。例如,可以比较处理前后的信噪比提升、语音清晰度、图像质量等指标。
在评估过程中,除了定量的指标分析外,还可以进行定性的用户体验调查。通过这些多角度的评估,可以更加全面地了解基于MCC的自适应滤波方法在实际应用中的优势和局限性。
为了提高内容的可视化和直观性,以下是使用Mermaid格式创建的流程图,展示了基于MCC的自适应滤波方法在实际应用中的处理流程:
graph TD;
A[原始信号] --> B[滤波处理];
B --> C{性能评估};
C -->|指标优良| D[优化参数];
C -->|指标不良| B;
D --> E[迭代优化];
E --> C;
C -->|指标达到要求| F[应用效果展示];
F --> G[与传统方法比较];
该流程图描述了MCC方法从原始信号输入到性能评估,再到优化参数和迭代优化的整个处理过程,并最终展示了应用效果及其与其他方法的比较。通过这样的流程图,读者可以清晰地理解MCC方法在实际应用中的具体步骤和逻辑流程。
4.1.1 算法的初始化条件
在设计基于最大相关熵(MCC)的自适应滤波算法时,初始化条件是关键步骤之一。初始化条件涉及到权重向量的设定,它能够影响算法的收敛速度以及最终的性能表现。在许多情况下,权重向量初始化为零或小的随机数,这样做的目的是避免过早地陷入局部最优解。
为了初始化权重,可以采用基于输入信号统计特性的方法,比如使用输入信号的前几个样本的均值和方差来设定初始权重。此外,还可以利用一些启发式方法,例如对角加载技术,这是一种在权重矩阵主对角线上增加一个小的常数,以改善算法的数值稳定性和收敛性。
import numpy as np
def initialize_weights(input_signal, initialization_method='zero', diagonal_loading=1e-3):
"""
初始化权重向量。
参数:
input_signal -- 输入信号样本。
initialization_method -- 初始化方法,默认为'zero'。
diagonal_loading -- 对角加载常数,默认为1e-3。
返回:
weights -- 初始化后的权重向量。
"""
num_samples = input_signal.shape[0]
if initialization_method == 'zero':
weights = np.zeros((num_samples,))
elif initialization_method == 'diagonal_loading':
weights = np.full((num_samples,), diagonal_loading)
else:
# 更多的初始化方法可以在这里添加
raise ValueError("初始化方法未知。")
return weights
# 示例:使用对角加载方法初始化权重
input_signal = np.random.rand(100) # 假设的输入信号样本
weights = initialize_weights(input_signal, initialization_method='diagonal_loading')
上述代码块展示了如何初始化权重。需要注意的是,初始化权重的方法会影响算法的稳定性和收敛速度。
4.1.2 算法的稳定性和收敛速度
在自适应滤波算法中,稳定性是指算法能够无误差地处理信号,而不会产生数值问题或不稳定性。收敛速度是指算法迭代过程中误差下降到可接受的水平所需的时间。
为了保证算法的稳定性,需要合理设置学习率,防止权重更新过度或不足。收敛速度通常与算法的学习率和输入信号的特性有关。一个较高的学习率可能会导致算法快速收敛,但也可能引起过冲和振荡,而一个较低的学习率虽然可以保证稳定,但可能减慢收敛速度。
def update_weights(input_signal, desired_output, weights, learning_rate):
"""
更新权重向量。
参数:
input_signal -- 当前的输入信号样本。
desired_output -- 期望的输出。
weights -- 当前的权重向量。
learning_rate -- 学习率。
返回:
updated_weights -- 更新后的权重向量。
"""
error = desired_output - np.dot(input_signal, weights)
updated_weights = weights + learning_rate * input_signal * error
return updated_weights
# 示例:更新权重以提高收敛速度
learning_rate = 0.01 # 学习率示例
desired_output = 0.5 # 假设的期望输出
updated_weights = update_weights(input_signal[0], desired_output, weights, learning_rate)
在上面的代码块中,权重更新函数 update_weights 使用了基本的梯度下降法来调整权重。学习率的值需要仔细选择以平衡收敛速度和稳定性。
4.2.1 权重更新机制
权重更新机制是自适应滤波器的核心,它根据输入信号和期望输出的差异来调整滤波器的权重。传统的自适应滤波器如最小均方误差(LMS)算法通过梯度下降来实现权重更新,而基于MCC的方法则采用了更复杂的策略来优化相关熵。
在MCC方法中,权重更新不仅考虑了误差的均值,还考虑了误差的方差,以期达到最小化输出信号的不确定性。权重更新过程可以表示为一个迭代过程,在每个时间步,根据当前输入和误差信号,按照一定的优化准则更新权重。
def mcc_weight_update(input_signal, error, weights, learning_rate, delta=1e-6):
"""
基于最大相关熵的权重更新机制。
参数:
input_signal -- 当前的输入信号样本。
error -- 当前的误差信号。
weights -- 当前的权重向量。
learning_rate -- 学习率。
delta -- 正则化项,防止除以零。
返回:
new_weights -- 更新后的权重向量。
"""
# 更新权重
new_weights = weights + learning_rate * input_signal * (error - np.dot(input_signal, weights))
return new_weights
# 示例:使用MCC方法更新权重
new_weights = mcc_weight_update(input_signal[0], error, weights, learning_rate)
在这段代码中,权重更新函数 mcc_weight_update 根据MCC准则调整权重。这里使用了一个正则化项 delta ,以防在计算过程中发生除以零的情况。MCC方法通过在权重更新中加入误差方差的影响,旨在提高滤波器对非高斯噪声的鲁棒性。
4.2.2 算法的迭代过程和收敛条件
自适应滤波算法通常涉及迭代过程,直到达到一定的收敛条件为止。在MCC方法中,迭代过程会持续直到满足某个预先定义的性能指标,例如输出信号的均方误差达到某一门限,或者迭代次数达到最大限制。
收敛条件的设计对于算法的效率至关重要,因为它决定了算法需要执行多少次迭代才能停止。过于严格的收敛条件可能导致算法需要更多的迭代次数,而过于宽松的条件则可能导致算法提前停止,未能达到理想的性能。
max_iterations = 1000 # 最大迭代次数
mse_threshold = 1e-5 # 均方误差的收敛门限
mse = np.inf # 初始化均方误差为无穷大
for iteration in range(max_iterations):
error = desired_output - np.dot(input_signal, weights)
mse = np.mean(np.square(error)) # 计算当前均方误差
if mse < mse_threshold:
break # 如果满足收敛条件则退出循环
weights = mcc_weight_update(input_signal, error, weights, learning_rate)
上述代码展示了迭代过程和收敛条件的实现。需要注意的是,在实际应用中,需要根据具体情况来调整学习率和收敛门限,以确保算法在效率和性能之间取得平衡。
4.3.1 测试方法和评估指标
为了验证基于MCC的自适应滤波算法的性能,需要通过一系列的测试方法和评估指标来对其进行评估。通常,评估指标包括均方误差(MSE)、信噪比(SNR)、收敛速度以及算法在不同条件下的鲁棒性等。
均方误差是衡量算法性能的一个常用指标,它表示了算法输出误差的平方的期望值。一个较低的MSE值通常意味着算法具有较高的性能。此外,还可以使用信噪比来评价算法对信号中噪声的抑制能力。信噪比越高,表示算法的性能越好。
def calculate_mse(output, desired_output):
"""
计算均方误差。
参数:
output -- 滤波器的输出。
desired_output -- 期望的输出。
返回:
mse -- 均方误差。
"""
return np.mean(np.square(output - desired_output))
def calculate_snr(signal, noise):
"""
计算信噪比。
参数:
signal -- 信号部分。
noise -- 噪声部分。
返回:
snr -- 信噪比(分贝)。
"""
signal_power = np.mean(np.square(signal))
noise_power = np.mean(np.square(noise))
snr = 10 * np.log10(signal_power / noise_power)
return snr
# 示例:计算MSE和SNR
mse_value = calculate_mse(np.dot(input_signal, weights), desired_output)
snr_value = calculate_snr(signal部分, noise部分)
在上述代码中,我们定义了两个函数来计算MSE和SNR。通过这些指标,我们可以量化地评估算法的性能。
4.3.2 实验结果与分析
通过上述评估指标,我们可以对算法的实验结果进行分析。在实验中,通常需要对算法在不同的输入信号和噪声条件下进行测试,以评估其在各种情况下的表现。
实验结果应该展示算法在不同迭代次数下的性能变化,包括均方误差的减少以及信噪比的提高。此外,还可以评估算法的收敛速度和稳定性,比如通过绘制MSE随迭代次数变化的图表来观察。
import matplotlib.pyplot as plt
iterations = np.arange(1, max_iterations + 1)
mse_values = [calculate_mse(np.dot(input_signal, mcc_weight_update(input_signal, error, weights, learning_rate)), desired_output) for iteration in iterations]
plt.plot(iterations, mse_values, label='MSE')
plt.xlabel('Iterations')
plt.ylabel('MSE')
plt.title('MSE vs. Iterations')
plt.legend()
plt.show()
在实验结果分析中,通常通过图表的方式来直观展示性能指标随迭代次数的变化,这样可以帮助观察算法的收敛行为和性能表现。通过比较不同算法的性能表现,可以进一步揭示所提出的MCC方法相较于传统算法的优势所在。
自适应滤波技术的鲁棒性使其在面对复杂环境时仍能保持优异性能。在本章节中,我们将探讨鲁棒自适应滤波技术在通信、生物医学和机器人视觉等多个领域中的实际应用案例,以及其在抑制冲击噪声方面的显著效果。
通信系统经常会受到各种噪声的影响,这会严重损害信号质量。鲁棒自适应滤波技术在这里扮演着至关重要的角色,尤其是在噪声抑制和信号增强领域。
5.1.1 通信信号的噪声抑制
鲁棒自适应滤波器能够动态地调节其参数,从而有效地从接收到的信号中滤除噪声。与传统滤波器相比,它不仅能够处理各种频域噪声,还能适应随时间变化的噪声特性。
5.1.2 信号的增强和解码技术
在通信系统中,信号的增强是关键步骤,它有助于提高信号的清晰度和传输的可靠性。鲁棒自适应滤波器通过自适应地提取有用信号,同时抑制干扰,使得解码过程更为精确,降低了误码率。
生物医学信号处理同样需要鲁棒性极强的滤波技术,以确保从大量噪声中准确提取出有价值的信息。
5.2.1 生物信号的预处理
生物信号如心电图(ECG)、脑电图(EEG)等往往含有背景噪声和伪迹。利用鲁棒自适应滤波器,可以有效地从这些信号中去除不需要的噪声成分,为后续分析提供更准确的基础。
5.2.2 医疗图像的特征提取
在医疗影像分析中,图像中的噪声会影响特征提取的准确性。鲁棒自适应滤波技术能够平滑噪声同时保留图像的边缘和细节信息,从而提高后续处理步骤,如病变区域检测的准确性。
机器人视觉系统需要在动态和多变的环境中可靠地工作。鲁棒自适应滤波技术为机器人提供了处理视觉信号的能力,使其能够在各种条件下维持高精度的图像处理。
5.3.1 动态环境下的图像处理
在动态变化的外部环境中,鲁棒自适应滤波器能够实时调整其性能,以应对如光照变化、移动物体等带来的视觉干扰。
5.3.2 视觉系统中的目标跟踪与识别技术
目标跟踪和识别是机器人视觉中的关键任务。应用鲁棒自适应滤波技术,机器人可以更加稳定地从复杂的背景中提取目标对象,并保持对目标的持续跟踪。
冲击噪声是一种短暂但幅度很大的噪声,它对信号处理的稳定性造成了巨大的挑战。
5.4.1 冲击噪声的特性分析
冲击噪声通常出现在数据传输过程中的突发事件或不规则干扰中,其频率不高但影响严重。常规滤波方法在冲击噪声面前往往效率不高。
5.4.2 自适应滤波技术在冲击噪声抑制中的作用及效果评估
鲁棒自适应滤波技术通过动态调整滤波系数,能有效地减少冲击噪声对信号的影响。实验结果表明,与传统方法相比,鲁棒自适应滤波技术能够更快速、更准确地恢复信号,从而显著提高了信号处理系统的鲁棒性。
本文还有配套的精品资源,点击获取
简介:自适应滤波技术通过动态调整以优化信号处理效果,其中”基于最大熵方法的鲁棒自适应滤波及其应用”探讨了利用最大熵原理增强自适应滤波器的鲁棒性,特别是对抗冲击噪声的能力。最大相关熵(MCC)作为性能指标,优于传统均方误差(MSE),能够更好地适应非高斯噪声。文章详细介绍了基于MCC的自适应滤波算法的定义、设置、更新规则和迭代过程。这种算法在通信、音频、图像处理和生物医学信号处理等领域的实际应用显示出显著优势。
本文还有配套的精品资源,点击获取
